

You’d think that once I finished my final year project, I’d be done with it—right? I got the grade, I attended my graduation—surely that gave me every right to walk away from the flight motion platform after all that work.
No.
I wasn’t done with the project. In fact, the real journey hadn’t even properly begun by the time I finished my course.
As I alluded to in my first part, the flight motion platform was actually part of a much larger initiative—one that Middlesex University was developing in collaboration with the Royal Aeronautical Society, Aerobility, Coventry University, and others.

Here are the highlights from that extra three-month journey—one that culminated in what was, quite possibly, one of the best days of my life.



Fluidic muscle control is a long story—fully detailed in my report —but the key point is this: a fluidic muscle is a non-linear system. Non-linear systems are hard to control. To make matters more challenging, we didn’t have a sensor, so a closed-loop system wasn’t possible. The software simply had to send the correct pressure to the muscle—there was no feedback.
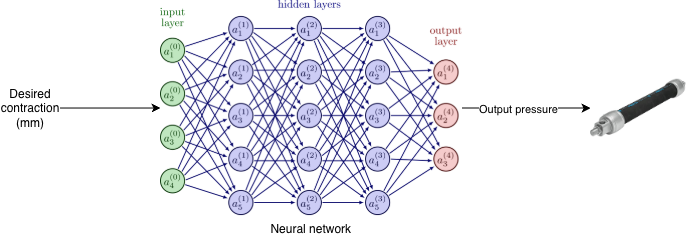
My thesis initially addressed this using a lookup table based on rig calibration data. However, I wanted to push the actuator accuracy further, so I developed an alternative control method using an ANN.
ANNs are well-suited for approximating outputs in non-linear systems. I trained a simple model on demo flight data, which resulted in a 71% improvement in accuracy.
Despite this success, we ultimately stuck with the original look-up table approach. It was proven, reliable, and—given the stakes—we didn’t want to risk introducing uncertainty for the big day.







What - a - day. Easily one of the best I have ever lived and one that truly reinforced my drive for doing what I love. To work on great projects and do great work that makes others happy.
.jpg)



